What good is power?
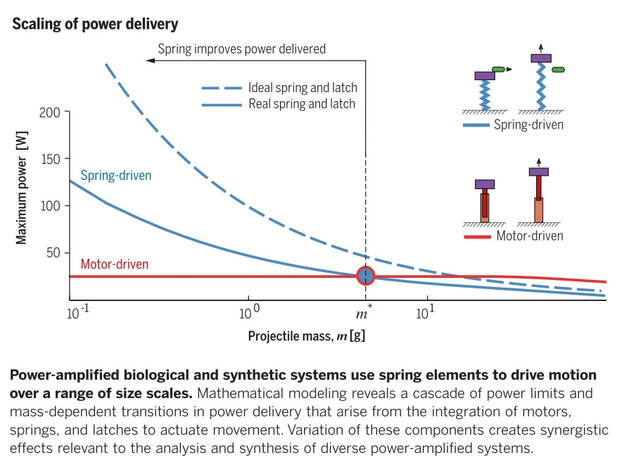
The fastest biological movements aren't driven by muscles, but by springs - like a bow propels an arrow. When then, do we ever use muscles? In a recent paper in Science, we explored how and when springs help and when they don't. This work provides insights into the limits of movement driven by biological elastic materials.
We found that springs improved performance only when tightly tuned to the rest of the elastic system.
We found that springs improved performance only when tightly tuned to the rest of the elastic system.
What makes a good spring?
|
Springs are commonly treated as idealized objects that return all the energy stored in them. But, like any actuator, springs face limitations. Understanding the conditions in which different spring material and geometric properties limit spring efficiency is crucial to understanding how and why different organisms use different kinds of springs. In collaboration a Sheila Patek and Al Crosby, we’ve been exploring questions like: How does a ‘good’ spring for powering a low-force, high-velocity motion differ from one driving high-force, low-velocity motions? Under what conditions is spring efficiency prioritized over resilience?
Ilton Cox Egelmeers, Sutton & Crosby 2019 Soft Matter |
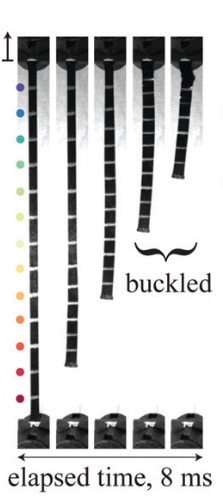
We quantified the efficiency of spring recoil across different spring material properties and geometries.
|
How do lever mechanics influence the limits of biological motion?
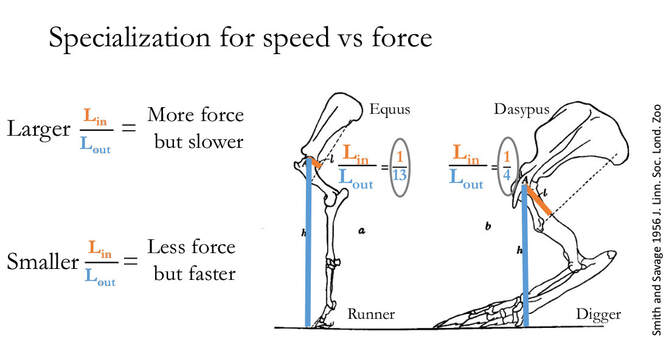
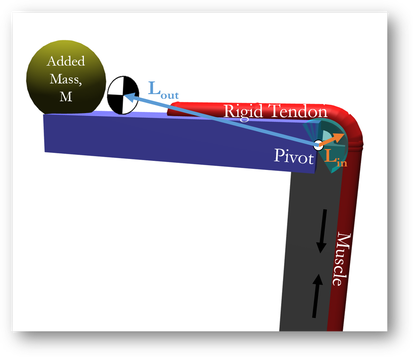
Traditionally, it was thought that skeletons had been specialized for either speed or force depending on the relative lengths of input and output levers across a joint. But this inference relied on simplifications that ignore muscle force-length-velocity effects and inertia. We utilized musculoskeletal modeling to explore the interaction between muscle and lever morphology and inertia to test whether this holds in dynamic systems.
Instead of a force-velocity tradeoff, we found that there was a optimum input lever length that maximized both output force and velocity. This optimum varied with muscle properties and driven mass. Our results suggest that the focus on adaptations for speed should shift from lever mechanics alone to include the interaction between lever mechanics, muscle morphology and system inertia.
Preprint
Instead of a force-velocity tradeoff, we found that there was a optimum input lever length that maximized both output force and velocity. This optimum varied with muscle properties and driven mass. Our results suggest that the focus on adaptations for speed should shift from lever mechanics alone to include the interaction between lever mechanics, muscle morphology and system inertia.
Preprint
OpenSim simple lever model driven by muscle activation
Cavitation
Does cavitation limit how fast organisms can move through water? Not all physical limitations come from within the system. Some external phenomena may also constrain biological movement. One possible constraint on aquatic speed may be cavitation. Cavitation is a phase change from a liquid to a gas, akin to boiling. But while boiling is the result of raising temperature, cavitation occurs with decreases of pressure that accompanies moving quickly through water. Cavitation generates very short lived bubbles that collapse back in on themselves so quickly that they emit shock waves that are powerful enough to erode holes in metal. How have fast moving aquatic organisms dealt with cavitation?
Mantis shrimp appear to not only avoid cavitation despite moving at over 30 m/s, but also may harness cavitaion to help fracture hard bodied prey. In this video (30,000 fps), a smithii mantis shrimp smashes a snail shell. Notice the flash of light and bubble at impact. That is cavitation. Most often, we only see cavitation at mantis shrimp impacts, and not before when we would expect it given how fast they are moving through the water (30 m/s). Why?
Mantis shrimp appear to not only avoid cavitation despite moving at over 30 m/s, but also may harness cavitaion to help fracture hard bodied prey. In this video (30,000 fps), a smithii mantis shrimp smashes a snail shell. Notice the flash of light and bubble at impact. That is cavitation. Most often, we only see cavitation at mantis shrimp impacts, and not before when we would expect it given how fast they are moving through the water (30 m/s). Why?
Ninjabot
|
To study when cavitation forms in these complex fluid dynamic conditions, I built Ninjabot, a physical model of the extremely fast mantis shrimp (Stomatopoda). Ninjabot rotates a to-scale appendage within the environmental conditions and close to the kinematic range of mantis shrimp’s rotating strike. Ninjabot is an adjustable mechanism that can repeatedly vary independent properties relevant to fast aquatic motions to help isolate their individual effects. Ninjabot’s appendage can reach speeds of 30 m/s at accelerations of 3.2 × 10^4 m/s^2 making Ninjabot the fastest biomimetic robot to date. The first study with Ninjabot explored the kinematic predictors of cavitation onset in non-uniform conditions.
It turns our that it is rather easy to cavitate when moving at these speeds. Here cavitation forming on a mantis shrimp appendage rotated by Ninjabot at 26 m/s. Filmed at 30,000 fps. Why does cavitation easily form when an appendage is moved with Ninjabot but not on the animals? Cox, SM, Schmidth, D, Modarres-Sadeghi, Y, Patek, SN A physical model of the extreme mantis shrimp strike: kinematics and cavitation of Ninjabot. Bioinspiration and Biomimetics 2014 |
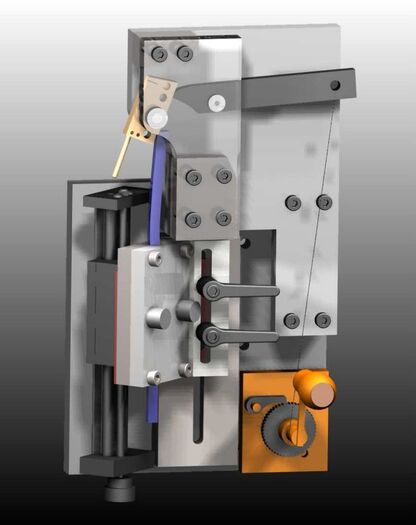
Ninjabot: a mechanical model of the mantis shrimp rotating strike that can acceleration at over, 10,000 m/s^2 in water used to study cavitation onset in non-steady flows
|